SLAM Ż©Simultaneous Localization and Mapping ,╝┤ĢrČ©╬╗┼cĄžłDśŗĮ©Ż®Ż¼╩ŪÖCŲ„╚╦═©▀^ī”Ė„ĘNé„ĖąŲ„öĄō■▀Mąą▓╔╝»║═ėŗ╦ŃŻ¼╔· │╔ī”Ųõūį╔Ē╬╗ų├ū╦æBĄ─Č©╬╗║═ł÷Š░ĄžłDą┼ŽóĄ─ŽĄĮyĪŻSLAM╝╝ągī”ė┌ÖCŲ„╚╦Ą─▀\äė║═Į╗╗ź─▄┴”╩«ĘųĻPµIĪŻ
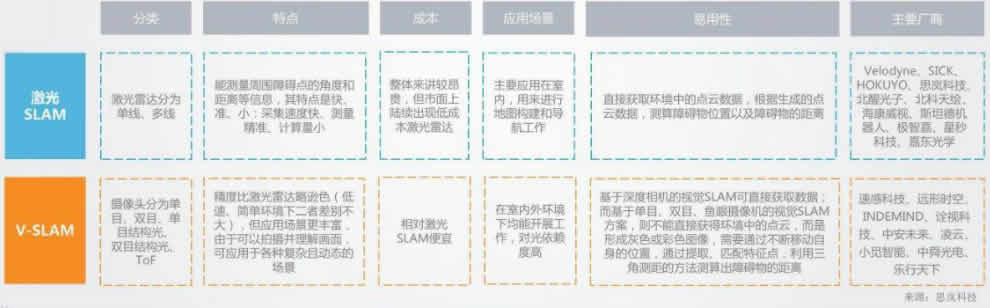
SLAMŽĄĮy═©│Ż░³║¼ČÓĘNé„ĖąŲ„║═ČÓĘN╣”─▄─ŻēKĪŻ░┤šš║╦ą─Ą─╣”─▄─ŻēKģ^ĘųŻ¼─┐Ū░│ŻęŖĄ─ÖCŲ„╚╦SLAMŽĄĮy┐╔Ęų×ķā╔ĘNą╬╩Į:╗∙ė┌╝ż ╣Ō└ū▀_Ą─SLAMŻ©╝ż╣ŌSLAMŻ®║═╗∙ė┌ęĢėXĄ─SLAMŻ©V-SLAMŻ®ĪŻ╝ż╣ŌSLAM─┐Ū░░lš╣▒╚▌^│╔╩ņĪóæ¬ė├ÅVĘ║Ż¼╬┤üĒČÓé„ĖąŲ„╚┌║ŽĄ─SLAM ╝╝ągīóųØu│╔×ķ╝╝ąg┌ģä▌Ż¼╚ĪķLčaČ╠Ż¼Ė³║├ĄžīŹ¼FČ©╬╗ī¦║ĮĪŻ
š¬ūįŻ║ĪČ2020ųąć°Ę■äšÖCŲ„╚╦«aśI░lš╣蹊┐ł¾ĖµĪĘ
SLAMļAČ╬Ż║ĮŌøQÅ─įŁ╩╝é„ĖąŲ„öĄō■ķ_╩╝Ż¼śŗĮ©─│ĘN╗∙ĄAĄžłDĄ─▀^│╠,ś╦ūóļAČ╬Ż║į┌SLAMĮY╣¹╗∙ĄA╔Ž▀Mąą╚╦×ķś╦ūóŻ¼īŹ¼FĖ³Š½╝ÜĄ─Į╗═©ęÄät┐žųŲ
łDŽ±Öz╦„╩Ūėŗ╦ŃÖCęĢėXųą╗∙ĄAĄ─æ¬ė├Ż¼┐╔Ęų×ķ╬─ūų╦čłD║═ęįłD╦čłDĪŻĮĶų·ė┌ŠĒĘe╔±ĮøŠWĮjCNNÅŖ┤¾Ą─Į©─Ż─▄┴”Ż¼łDŽ±Öz╦„Ą─Š½Č╚įĮ░l╠ßĖ▀
öĄō■╦∙ėąÖÓĘĮ├µŻ¼1įŁ╩╝öĄō■ī┘ė┌éĆ╚╦Ż¼2Ų¾śIŽĒėąč▄╔·öĄō■╦∙ėąÖÓŻ¼3š■Ė«ŽĒėąš■Ė«öĄō■Ą─Üwī┘ÖÓ
─X┐ŲīWĄ─░lš╣īó═Ųäė╚╦╣żųŪ─▄┐ŲīWÅ─Ėąų¬╚╦╣żųŪ─▄ĄĮšJų¬╚╦╣żųŪ─▄Ą─┐ńįĮ
ÖCąĄ╩ų├µ┼RĄ─ļy³cį┌ė┌╚ń║╬į┌╚ßąį╬’¾w╔Ž╩®╝ė┐╔┐žĄ─öDē║┴”Ż¼ęį╝░į┌ĘŪĘĆČ©ĀŅørŽ┬┤_▒ŻŠ½┤_ĪóĘĆĮĪĄ─ūź╬š┼c╚ßąįųĖČ╦▓┘┐ž
DFN─Żą═ŠC║Ž╩╣ė├┴╦ė├æ¶Ą─ļ[╩Įš²Ę┤üŻ©³cō¶ąą×ķŻ®Īóļ[╩ĮžōĘ┤üŻ©Ųž╣ŌĄ½╬┤³cō¶Ą─ąą×ķŻ®ęį╝░’@╩ĮžōĘ┤üŻ©³cō¶▓╗Ėą┼d╚ż░┤Ōoąą×ķŻ®Ą╚ą┼Žó
▄ø¾wÖCąĄ╩ų│õĘų└¹ė├║═░lō]Ė„ĘN╚ßąį▓─┴ŽĄ─╚ßĒśąįŻ¼╝░ŲõĘŪŠĆąįĪóš│ÅŚąį║═▀t£■╠žąįĄ╚į┌▄ø¾w╩ų▀\äė║═┐žųŲųąØōį┌Ą─Ī░ÖCąĄųŪ─▄Ī▒ū„ė├Ż¼ĮĄĄ═┐žųŲĄ─Å═ļsČ╚Ż¼īŹ¼FĖ▀ņ`╗ŅąįĪóÅŖ▀mæ¬ąį║═┴╝║├Į╗╗źąįŻ¼į┌ßt»¤┐ĄÅ═ŅIė“ėąųžę¬æ¬ė├ārųĄ
ųŪ─▄┐═Ę■ŽĄĮyųą╚╦ÖCĮY║ŽĄ─Ę■äšą╬╩ĮŻ¼Å─╬ÕéĆŠSČ╚┐éĮY║═ĮķĮBŪķĖąĘų╬÷╝╝ągį┌ųŪ─▄┐═Ę■ŽĄĮyųąĄ─æ¬ė├ł÷Š░Ż¼░³└©ŪķĖąĘų╬÷╦ŃĘ©─Żą═Ą─įŁ└Ē╝░īŹļH┬õĄž╩╣ė├ĘĮ╩Į║═ą¦╣¹Ęų╬÷
AI╚╦╣żųŪ─▄╝╝ągąĶ꬜ŗĮ©ÅŖėą┴”Ą─IT╗∙ĄAįO╩®,╚╦╣żųŪ─▄Ą─╣żū„ų„ę¬ė╔▓╔╝»Īó£╩éõĪóė¢ŠÜ║══Ų└Ē╦─▓┐ĘųĮM│╔Ż¼├┐éĆ▓┐ĘųąĶę¬ūxīæ▓╗═¼ŅÉą═Ą─öĄō■Ż¼╣żū„žō▌dę▓▓╗▒MŽÓ═¼Ż¼īóĮo┤µā”įOéõĦüĒ▌^┤¾Ą─╠¶æĪŻ
╗∙ė┌╠▌Č╚Ę┤Ž“é„▓źĄ─├}ø_╔±ĮøŠWĮjŻ©SNNŻ®ė¢ŠÜĘĮĘ©ųØu┼dŲĪŻį┌▀@ĘNė¢ŠÜĘĮĘ©Ž┬Ż¼SNN─▄ē“į┌▒Ż┴¶╔±Įøį¬ā╚▓┐äė┴”īWĄ─═¼Ģr½@Ą├▌^║├Ą─ąį─▄
Cartographer┐ńŲĮ┼_║═é„ĖąŲ„┼õų├,MC2SLAMīŹĢr╝ż╣Ō└’│╠ėŗŽĄĮy,LeGO-LOAMĘN▌p┴┐╝ē║═Ąž├µā×╗»Ą─╝ż╣Ō└ū▀_└’│╠ėŗ║═Į©łDĘĮĘ©,SUMA++ķ_į┤Ą─╗∙ė┌šZ┴xą┼ŽóĄ─╝ż╣Ō└ū▀_SLAMŽĄĮy
╚╦╣żųŪ─▄×ķ╩▓├┤Ģ■«a╔·Ī░×─ļyąį▀z═³Ī▒Ż┐─┐Ū░Ż¼ĮŌøQ×─ļyąį▀z═³Ą─ĘĮ░Ėėą──ą®Ż┐ļy³cį┌──Ż┐üĒ┐┤┐┤īŻ╝ęį§├┤šf






