
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
1Īóšō╬─▒│Š░
─┐Ū░▀b▓┘ū„ÖCŲ„╚╦į┌ßt»¤┼R┤▓Īó┐ĄÅ═Īó╔Ņ║Ż╠Į£yĪóŠ╚į«Š╚×─Ą╚ųTČÓŅIė“Ą├ĄĮ┴╦ÅVĘ║Ą─æ¬ė├Ż©łD1Ż®ĪŻĄ½╩Ūį┌▓┘ū„▀^│╠ųąŻ¼ė╔ė┌╚╦ÖCĮ╗╗źąį─▄▓╗ūŃĪóĖąų¬─▄┴”▓╗╝čŻ¼ÖCŲ„╚╦ų╗─▄═Ļ│╔ę╗ą®║åå╬ĪóųžÅ═Ą─╚╬äšĪŻ└²╚ńŻ¼▓┘ū„╚╦åT┐žųŲÖCŲ„╚╦ł╠ąąpickup╚╬äš[1]║═ŠSūo╚╬äš[2]ĪŻ×ķ┴╦ĮŌøQ╔Ž╩÷å¢Ņ}Ż¼╬ęéā╠ß│÷┴╦ę╗ĘNą┬ą═Ą─╚╦ÖCĮ╗╗źĖąų¬ÖCųŲ║═īW┴Ģ╦ŃĘ©üĒ╠ßĖ▀▀b▓┘ū„ÖCŲ„╚╦Ą─▓┘┐žąį─▄ĪŻ╩ūŽ╚Ż¼×ķ┴╦į÷ÅŖ▀b▓┘ū„ŽĄĮyĄ─Ėąų¬─▄┴”Ż¼╬ęéāįOėŗ┴╦ę╗éĆ╗∙ė┌╝Ī╚Ō╗ŅąįĄ─╚╦ÖCĮ╗╗źĮń├µŻ¼╠ß╚Ī▓┘ū„š▀Ą─╝ĪļŖą┼╠¢Ż¼ė├ė┌ī”═ŌĮńŁhŠ│ū÷│÷Ę┤æ¬ĪŻ═©▀^▀b▓┘ū„ŽĄĮyĄ─ė|ėXĘ┤ü║═ęĢėXĘ┤üŻ¼╚╦ŅÉ▓┘ū„š▀┐╔ęįūį╚╗Ąžū„│÷Ę┤æ¬Ż¼░l│÷š²┤_Ą─┐žųŲ├³┴ŅĪŻ╝ĪļŖą┼╠¢Ą─ÅŖ╚§ļSų°▓┘ū„╚╬䚥─▓╗═¼Č°▓╗═¼Ż¼═¼Ģr╚╦ÖCģfū„▀^│╠ųąĄ─╝Ī╚Ō╗Ņąįūā╗»ĪóÖCŲ„╚╦─®Č╦ł╠ąąŲ„Ą─▄ē█EĪó▓┘ū„š▀Ą─▀\äėŻ¼Č╝┐╔ęįė├üĒ▒Ēš„╚╦ÖCģfū„╚╬äš║═ęŌłDĪŻÖCŲ„╚╦┐╔ęį═©▀^īW┴Ģ╚╦ŅÉĄ─▓┘ū„ąą×ķüĒ╠ß╔²ųŪ─▄╗»│╠Č╚Ż¼īW┴ĢĄ─ā╚╚▌▓╗āH░³└©▀\äė▄ē█EŻ¼▀Ćėą╚╦ŅÉł╠ąą╚╬äšĢrĄ─äéČ╚ĪŻ═©▀^īW┴Ģ╚╦ŅÉĄ─▓┘ū„ąą×ķŻ¼▀b▓┘ū„ÖCŲ„╚╦┐╔ęį¬Ü┴ó═Ļ│╔ųžÅ═ąį╚╬äš╗“š▀▓╗┤_Č©ąį╚╬äšĪŻ

łD1ÖCŲ„╚╦▀b▓┘ū„╩ŠęŌłD
2ĪóŽĄĮyĖ┼╩÷
╚ńłD2╦∙╩ŠŻ¼╬ęéā└¹ė├Å─Č╦ÖCŲ„╚╦Ą──®Č╦ł╠ąąŲ„üĒ═Ļ│╔ł╠ąą╚╦ÖCģfū„╚╬䚯¼▓╔ė├ļ[░ļ±RĀ¢┐ŲĘ“─Żą═½@╚Ī╚╦ÖCģfū„╚╬äš─Żą═ĪŻį┌╩ŠĮ╠▀^│╠ųąŻ¼▓┘ū„š▀┐╔ęį═©▀^╔·╬’ą┼╠¢Ėąų¬Įń├µĖąų¬▓┘ū„▀^│╠ųą═Ō┴”Ą─ūā╗»Ż¼īŹĢrš{š¹╦∙ąĶĄ─į÷ęµ/äéČ╚Ż¼▓óīóŲõė│╔õĄĮÅ─Č╦ÖCŲ„╚╦Ą─┐žųŲŲ„ųąĪŻ╩ŠĮ╠▀^│╠ųąų„ę¬┐╝æ]┴╦╚╬äš▄ē█EĪóäéČ╚║═┴”Ą╚öĄō■Ż¼═©▀^╚╬äšīW┴Ģ┼cÅ═¼FļAČ╬Ż¼ą╬│╔┴╦╚╦į┌ķ]ŁhŽĄĮyųąĄ─╝╝─▄Į©─ŻĘĮ░ĖĪŻ╚ńłD3╦∙╩ŠŻ¼╚ńłDįō┐“╝▄ųąīó╚╦ÖCģfū„╚╬äšĘų×ķā╔éĆļAČ╬Ż║īW┴ĢļAČ╬║═Å═¼FļAČ╬ĪŻį┌īW┴ĢļAČ╬Ż¼╗∙ė┌ļ[░ļ±RĀ¢┐ŲĘ“║═╗ņ║ŽĖ▀╦╣─Żą═ĘĮĘ©┐╔ęįī”╚╦ÖCģfū„╚╬äš▀MąąīW┴ĢŻ¼Į©┴ó╗∙ė┌▀\äė▄ē█EĄ─╔·│╔╚╬äš─Żą═ĪŻį┌Å═¼FļAČ╬Ż¼╗∙ė┌ļ[░ļ±RĀ¢┐ŲĘ“║═╗ņ║ŽĖ▀╦╣╗žÜwĘĮĘ©┐╔ęįī”╔·│╔─Żą═Ą─╚╬äš▄ē█E▀Mąąą▐š²Ż¼Å─īW┴ĢĄ─╚╬äšųąÅ═¼FĮY╣¹[3]ĪŻ
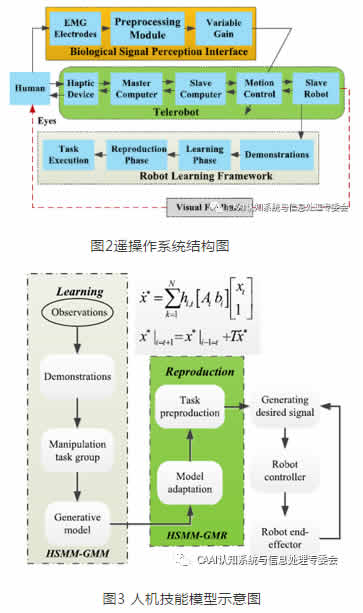
3ĪóīŹ“×Ęų╬÷
▓┘ū„š▀═©▀^Touch X┐žųŲBaxterÖCŲ„╚╦ł╠ąą└LłD╚╬䚯¼š¹éĆ╚╬äš▀^│╠▀Mąą3┤╬╚╦ÖCģfū„╩ŠĮ╠Ż¼└LłD╚╬äšį┌ę╗Åł┤¾ąĪ×ķ210mm297mm (A4)Ą─Č■ŠS┐šķgā╚▀MąąĪŻłD4(a)╦∙╩Š×ķ└L«ŗ╚╬䚥─▀\äė▄ē█E║═äéČ╚▄ē█EĪŻ╗ę╔½Ū·ŠĆ×ķ╚╦ÖCģfū„└L«ŗĄ─▄ē█EŻ¼╝t╔½Ū·ŠĆ×ķ╚╬äš╔·│╔ļAČ╬Ą─ĮY╣¹ĪŻ╔·│╔ļAČ╬┐╔ęįäØĘų×ķ6éĆ▓Į¾E(I-VI)║═╚²éĆūė╚╬äšĪŻį┌▓Į¾EI║═IIųąŻ¼BaxterÖCŲ„╚╦ķ_╩╝└LłDūė╚╬äš1ĪŻ▓Į¾EII║═▓Į¾EIIIŻ¼BaxterÖCŲ„╚╦ėę▒█─®Č╦ļxķ_╝łÅł▀MąąŽ┬ę╗┤╬└LłD▓┘ū„ĪŻŅÉ╦ŲĄžŻ¼ūė╚╬äš2║═ūė╚╬äš3Ęųäeė╔▓Į¾EIIIĄĮIV║═▓Į¾EVĄĮVI═Ļ│╔ĪŻį┌╚╬äšīW┴ĢļAČ╬Ż¼▓┘ū„š▀Ą─╩ų▒█äéČ╚╩ŪļSų°└L«ŗ╚╬äš▀^│╠Ą─ūā╗»Č°ūā╗»ĪŻ╚ńłD4(b)╦∙╩ŠŻ¼BaxterÖCŲ„╚╦▓╔ė├╔·│╔Ą─äéČ╚ł╠ąą└L«ŗ╚╬äšĪŻÅ─łD4(b)ųąĄ─(a)-(f)┐╔ęįĄ├│÷Ż¼BaxterÖCŲ„╚╦└¹ė├╔·│╔Ą──Żą═│╔╣”Ą─═Ļ│╔┴╦└LłD╚╬äšĪŻ

4ĪóĘų╬÷┼cĮYšō
▒Š╬─╠ß│÷┴╦ę╗ĘNą┬ą═Ą─ė|ėX╝ĪļŖĖąų¬ÖCųŲ║═╗∙ė┌ļ[░ļ±RĀ¢┐ŲĘ“─Żą═-Ė▀╦╣╗ņ║Ž└ĒšōĄ─ÖCŲ„╚╦īW┴Ģ┐“╝▄ĪŻ▓┘ū„š▀═©▀^š{╣Øūį╔ĒĄ─╝Ī╚Ō╗ŅąįüĒæ¬ī”═ŌĮńŁhŠ│Ą─ūā╗»Ż¼═¼Ģrė^▓ņ║═ėøõø╚╦ÖCģfū„▀^│╠ųąĄ─╝Ī╚Ō╗ŅäėŪķørĪŻ└¹ė├▓╔╝»Ą─╝ĪļŖą┼╠¢║═╠ß│÷Ą─╚╬äšīW┴Ģ┐“╝▄Ż¼▀b▓┘ū„ÖCŲ„╚╦ŽĄĮy┐╔ęįūį╚╗Ąž┼c═ŌĮńŁhŠ│▀MąąĮ╗╗źĪóŠÄ┤a╚╦ÖCģfū„╚╬äš║═╔·│╔╚╬äš─Żą═Ż¼Å─Č°╠ß╔²ŽĄĮyĄ─ŅÉ╚╦╗»▓┘ū„ąą×ķ║═ųŪ─▄╗»│╠Č╚ĪŻ
ģó┐╝╬─½IŻ║
[1] Penco L, Scianca N, Modugno V, et al. A MultimodeTeleoperation Framework for Humanoid Loco-Manipulation: An Application for the iCub Robot. IEEE Robotics & Automation Magazine, 2019, 26(4): 73-82.
[2] MaddahiY, Zareinia K, Sepehri N. An augmented virtual fixture to improve task performance in robot-assisted live-line maintenance. Computers & Electrical Engineering, 2015, 43: 292-305.
[3] Yang C, Luo J, Liu C, et al. Haptics electromyography perception and learning enhanced intelligence for teleoperated robot. IEEE Transactions on Automation Science and Engineering, 2018, 16(4): 1512-1521.
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |


