
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ųŪ─▄ÖCŲ„╚╦ę▓Ž±╚╦ę╗śėŠ▀ėąČ·▒Ū┐┌╔Ó╔ĒęŌŻĪį┌╝╝ągĘĮ├µ░┤šš═©│ŻĄ─└ĒĮŌ┐╔Ęų×ķ╚²┤¾▓┐Ęų╦─┤¾╝╝ągŻĪ
╚²┤¾▓┐ĘųŻ║Ėąų¬ĪóšJų¬║═ąą×ķ┐žųŲ
Ī±šJų¬▓┐ĘųĘųäežōž¤Ė³Ė▀īėĄ─šZ┴x╠Ä└ĒŻ¼╚ń═Ų└ĒĪóęÄäØĪóėøæøīW┴ĢĄ╚ĪŻ
Ī±ąą×ķ┐žųŲ▓┐ĘųīŻķTī”ÖCŲ„╚╦Ą─ąą×ķ▀Mąą┐žųŲĪŻ
╦─┤¾╝╝ąg
Ī±ī¦║ĮČ©╬╗╝╝ąg
Ī±ęĢėXĖąų¬╝╝ąg
Ī±Į╗╗ź╝╝ąg
Ī±įŲėŗ╦ŃĪó┤¾öĄō■╝╝ągĪŻ

Č©╬╗ī¦║Į╝╝ąg╩ŪīŹ¼FÖCŲ„╚╦ųŪ─▄ąąū▀Ą─Ą┌ę╗▓ĮŻ¼▒Š┘|╔ŽŠ═╩ŪÄ═ų·ÖCŲ„╚╦īŹ¼Fūįų„Č©╬╗ĪóĮ©łDĪó┬ĘÅĮęÄäØ╝░▒▄šŽĄ╚─▄┴”ĪŻ
į┌▀@└’Š═ąĶę¬╔µ╝░ĄĮÖCŲ„╚╦Ą─Ėąų¬─▄┴”Ż¼ąĶę¬ĮĶų·č█Š”Ż©╚ń╝ż╣Ō└ū▀_Ż®üĒÄ═ų·ÖCŲ„╚╦═Ļ│╔ų▄ć·ŁhŠ│Ą─Æ▀├ĶŻ¼┼õ║ŽŽÓæ¬Ą─╦ŃĘ©Ż¼śŗĮ©ėąą¦Ą─ĄžłDöĄō■Ż¼═Ļ│╔▀\╦ŃŻ¼īŹ¼FÖCŲ„╚╦Ą─ūįų„Č©╬╗ī¦║ĮĪŻ
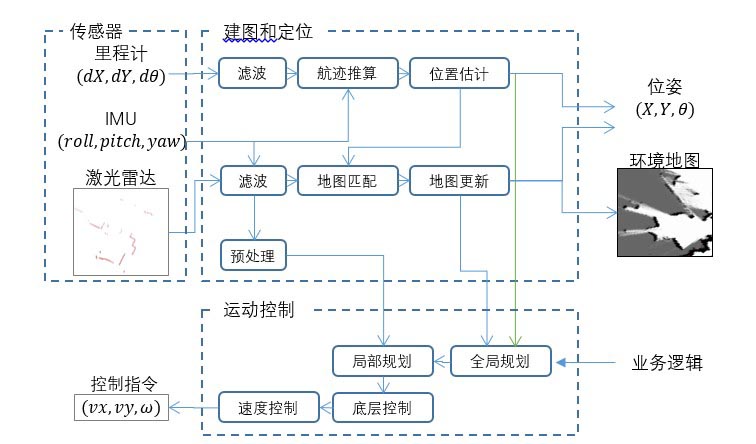
░┤šš╦∙īŹ¼FĄ─╣”─▄äØĘųŻ¼ūįų„Č©╬╗ī¦║Į╝╝ągų„ę¬░³║¼┴╦ęįŽ┬ā╚╚▌Ż║

į┌īŹļH╣żū„ųąŻ¼├┐éĆ▓┐ĘųČ╝╩ŪŠo├▄ŽÓ▀BĄ─Ż¼Ž┬łDš╣╩ŠĄ─╩Ūę╗éĆĄõą═ūįų„Č©╬╗ī¦║ĮŽĄĮyā╚▓┐Ė„ĮM╝■Ą─┐“╝▄Ż║
į┌īŹ¼FÖCŲ„╚╦Č©╬╗ī¦║Į╝╝ągųąŻ¼─┐Ū░ų„ę¬╔µ╝░ĄĮ>╝ż╣ŌSLAM╝░ęĢėXSLAM ,╝ż╣ŌSLAMų„ę¬▓╔ė├2D╗“3D╝ż╣Ō└ū▀_Ż¼Ą½æ¬ė├ė┌ÖCŲ„╚╦╔Žų„ę¬ęį2D╝ż╣Ō└ū▀_×ķų„Ż¼═©▀^╝ż╣Ō└ū▀_┐╔īŹĢr▓╔╝»ų▄ć·╬’¾wĄ─ŁhŠ│ą┼ŽóŻ¼ī”▓╔╝»ĄĮĄ─╬’¾wą┼Žó│╩¼F│÷ę╗ŽĄ┴ąĘų╔óĄ─ĪóŠ▀ėą£╩┤_ĮŪČ╚║═ŠÓļxĄ─³cįŲöĄō■Ż¼═©▀^╝ż╣ŌSLAMŽĄĮyī”▓╗═¼Ģr┐╠Ą─ā╔Ų¼³cįŲöĄō■▀MąąŲź┼õ┼c▒╚ī”Ż¼ėŗ╦Ń╝ż╣Ō└ū▀_ŽÓī”▀\äėĄ─ŠÓļx║═ū╦æBĄ─Ė─ūāŻ¼ę▓Š══Ļ│╔┴╦ī”ÖCŲ„╚╦▒Š╔ĒĄ─Č©╬╗ĪŻ
Č°ęĢėXSLAMĘĮ░Ė─┐Ū░ų„ę¬ėąā╔ĘNīŹ¼F┬ĘÅĮŻ¼ę╗ĘN╩Ū╗∙ė┌RGBDĄ─╔ŅČ╚özŽ±ÖCŻ¼▒╚╚ńKinectŻ¼▀Ćėąę╗ĘNŠ═╩Ū╗∙ė┌å╬─┐Īóļp─┐╗“š▀¶~č█özŽ±Ņ^ĪŻ╗∙ė┌╔ŅČ╚özŽ±ÖCĄ─ęĢėXSLAMŻ¼┼c╝ż╣ŌSLAMŅÉ╦ŲŻ¼ę▓╩Ū═©▀^╩š╝»ĄĮĄ─³cįŲöĄō■Ż¼üĒėŗ╦ŃšŽĄK╬’Ą─ŠÓļxĪŻ╗∙ė┌å╬─┐Īó¶~č█ŽÓÖCĄ─ęĢėXSLAMĘĮ░ĖŻ¼ų„ę¬╩Ū└¹ė├ČÓļłDŽ±üĒ╣└ėŗūį╔ĒĄ─╬╗ū╦ūā╗»Ż¼į┘═©▀^└█ėŗ╬╗ū╦ūā╗»üĒėŗ╦ŃŠÓļx╬’¾wĄ─ŠÓļxŻ¼▓ó▀MąąČ©╬╗┼cĄžłDśŗĮ©ĪŻ
Į³─ĻüĒŻ¼ė╔ė┌ęĢėXSLAM╩▄ŁhŠ│╣ŌŽ▐ųŲ▌^ČÓŻ¼¤oĘ©į┌░Ą╠Ä╣żū„Ż¼─┐Ū░╚į╠Äė┌čą░l║═æ¬ė├═žš╣╝░«aŲĘųØu┬õĄžļAČ╬ĪŻČ°╝ż╣ŌSLAMæ{ĮĶĘĆČ©ąįĖ▀Īó▓╗╩▄╣ŌŠĆė░ĒæĄ╚ā×ä▌Ż¼į┘╝ė╔Ž╝ż╣Ō└ū▀_│╔▒ŠĄ─ųØuŽ┬ĮĄŻ¼▒╗šJ×ķ╩Ū─┐Ū░ūŅŠ▀ā×ä▌Ą─Č©╬╗ī¦║ĮĘĮ░ĖĪŻ
╦╝Ź╣┐Ų╝╝ū„×ķć°ā╚│÷¼Fį┌ÖCŲ„╚╦Č©╬╗ī¦║Į╝╝ąg┘ÉĄ└Ą─Ų¾śIų«ę╗Ż¼į┌╝ż╣ŌSLAM╝╝ągųąęčėąŅIŽ╚ā×ä▌Ż¼Įø▀^ČÓ─ĻĄ─╝╝ąg│┴ĄĒŻ¼╦╝Ź╣┐Ų╝╝ūįų„čą░lĄ─Č©╬╗ī¦║ĮĘĮ░Ėęč▌Ś╔õė┌üåÜW├└ų▐Ą╚20ČÓéĆć°╝ę║═Ąžģ^Ż¼ōĒėą│¼▀^2000╝ęŲ¾śIė├æ¶╝░éĆ╚╦ė├æ¶└█ėŗ10╚f+Ż¼ū„×ķ╚½Ū“Å─╩┬ÖCŲ„╚╦ūįų„Č©╬╗ī¦║Į╝╝ągĄ─Ų¾śIŻ¼─┐Ū░╦╝Ź╣┐Ų╝╝╩ął÷š╝ėą┬╩Ė▀▀_70%ęį╔ŽŻ¼Ųõ│╔╩ņĄ─ÖCŲ„╚╦ūįų„Č©╬╗ī¦║ĮĘĮ░Ėęčæ¬ė├ė┌╬ó▄øĪóÜż┼ŲĪóā×▒ž▀xĪó┐Ų┤¾ėŹ’wĪó▄øŃyĄ╚ų¬├¹Ų¾śIĘ■äšÖCŲ„╚╦ĒŚ─┐ųąĪŻ
ō■┴╦ĮŌŻ¼╦╝Ź╣┐Ų╝╝ÖCŲ„╚╦Č©╬╗ī¦║ĮĘĮ░Ėų„ę¬ė╔Ė▀ąį─▄╝ż╣Ō└ū▀_RPLIDAR┼cČ©╬╗ī¦║Į┐žųŲ║╦ą─SLAMWARE coreśŗ│╔Ż¼Š▀ėą╝ęė├░µ╝░╔╠ė├░µų«ĘųŻ¼╝ęė├░µ£yŠÓĘČć·×ķ12├ūŻ¼Č°╔╠ė├░µät┐╔▀_ĄĮ25├ū╔§ų┴╩Ū40├ūĪŻįōī¦║Į╠ūčbŻ¼┐╔Ä═ų·ÖCŲ„╚╦į┌╬┤ų¬ŁhŠ│ųąīŹĢr╠ß╣®Č©╬╗Īóūįų„śŗĮ©ūŅĖ▀▀_5cmĘų▒µ┬╩Ą─ŁhŠ│ĄžłDŻ¼═¼Ģr▓╔ė├D*äėæB╝┤Ģr┬ĘÅĮęÄäØ╦ŃĘ©Ż¼ÖCŲ„╚╦┐╔ūįäė═Ļ│╔┬ĘÅĮęÄäØŻ¼į┌─░╔·ŁhŠ│ųąąąäėūį╚ńŻ¼▓óČŃ▒▄äėæBšŽĄK╬’ĪŻ
│²┤╦ų«═ŌŻ¼×ķ┴╦Ä═ų·Ų¾śI┐ņ╦┘īŹ¼FÖCŲ„╚╦Ą─ķ_░lŻ¼ęįūŅ┐ņ╦┘Č╚ōīš╝╩ął÷Ž╚ÖCŻ¼╦╝Ź╣┐Ų╝╝▀Ć═Ų│÷┴╦═©ė├ą═Ę■äšÖCŲ„╚╦ķ_░lŲĮ┼_Ż¼Ųõā╚ų├Ė▀ąį─▄SLAMWAREūįų„Č©╬╗ī¦║ĮŽĄĮyŻ¼▓╗āH×ķÖCŲ„╚╦╠ß╣®┴╦ūŅ╗∙▒ŠĄ─ūįų„ąąū▀─▄┴”Ż¼▀Ćų¦│ų╠ōöMē”║═╠ōöM▄ēĄ└Īóūįų„ĘĄ╗ž│õļŖĪóĄ┌╚²ĘĮæ¬ė├═žš╣╝░śŪīėĮ©łDī¦║ĮŻ¼ūįäėļŖ╠▌┐žųŲĄ╚ČÓĘN╣”─▄ĪŻė├æ¶┐╔Ė∙ō■īŹļHąĶę¬┤Ņ▌d▓╗═¼æ¬ė├Ż¼¤oąĶ═Ō▓┐ŁhŠ│š{š¹╝░╚╦×ķŠÄ│╠įOų├Ż¼┐╔▀mė├ė┌╔╠ł÷Īóßtį║Īó▓═ÅdĪó┐¦Ę╚ÅdĄ╚Ė„┤¾Ę■äšł÷╦∙ĪŻÖCŲ„╚╦ķ_░lŲĮ┼_Ą─│÷¼FŻ¼╩╣Ą├Ų¾śI┐╔┤¾┴┐ĮĄĄ═čą░l│╔▒ŠŻ¼īóĖ³ČÓĄ─Š½┴”═Č╚ļĄĮÖCŲ„╚╦╔Žīėæ¬ė├čą░lųąĪŻ
į┌īŹ¼FÖCŲ„╚╦Ą─ūįų„Č©╬╗ī¦║ĮųąŻ¼╬┤üĒČÓé„ĖąŲ„╚┌║Žīó╩Ū┤¾ä▌╦∙┌ģŻ¼Ųõųą░³└©╝ż╣Ō└ū▀_Īó│¼┬Ģ▓©ĪóĘ└Ą°┬õĪóĘ└┼÷ū▓╝░╔ŅČ╚özŽ±Ņ^Ą╚é„ĖąŲ„Ż¼╦╝Ź╣┐Ų╝╝Ą─ÖCŲ„╚╦ķ_░lŲĮ┼_Š═╗∙ė┌┴╦ČÓé„ĖąŲ„╚┌║Ž╝╝ągŻ¼╩╣Ųõ«a╔·Ė³╚½├µĪó┐╔┐┐Ą─ą┼ŽóŻ¼Š½£╩Ę┤ė│▒╗Öz£y╬’¾wĄ─╠žąįŻ¼ūīÖCŲ„╚╦īŹ¼FĖ³ųŪ─▄Ą─ąąū▀ĪŻ
 |
|
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |


